Yolo简介
Yolo简介
YOLO(You Only Look Once)是一种先进的深度学习目标检测算法,由Joseph Redmon等人在2015年首次提出。YOLO主要用于目标检测领域(机器视觉子领域),通过单次查看即可完成对图像中物体的识别和定位,具有速度快、准确率高、可解释性强和适用性广等优点,是当前目标检测领域最重要的代表之一。

1.什么是目标检测
目标检测是计算机视觉领域中的一项重要任务,主要是在图像或视频中确定特定目标的位置和类别。目标检测算法不仅要识别图像中的对象属于哪个类别,还要确定它们在图像中的具体位置,通常以边界框(bounding box)的形式表示。
YOLO(You Only Look Once)是一种基于深度学习的目标检测算法,由Joseph Redmon等人于2015年提出。它通过将目标检测任务转化为回归问题,实现了快速且准确的物体识别,广泛应用于计算机视觉领域,如自动驾驶、安防监控、智能交通等。
2.YOLO的核心特点
- 速度快:YOLO通过单次前向传播即可完成目标检测,无需复杂的候选框生成和分类流程,因此速度显著优于传统的Two-Stage方法(如Fast R-CNN)。
- 高准确率:尽管早期版本(如YOLOv1、YOLOv2)在准确率上有所欠缺,但经过多次迭代(如YOLOv5),其准确率已大幅提升,同时保持了较快的检测速度。
- 实时性:YOLO能够在实时场景下实现快速目标检测,适用于视频分析、自动驾驶等对实时性要求较高的领域。
YOLO的缺点是什么?
- 对小对象的检测性能较差:YOLO将图像划分为固定大小的网格,并且每个网格只预测一定数量的边界框。这使得YOLO在处理小对象或者一些密集的对象时,可能会遗漏一些对象或者无法准确地定位对象。
- 对相互重叠的对象处理不佳:由于每个网格只预测一定数量的边界框,所以当一个网格中有多个对象重叠时,YOLO可能无法准确地检测出所有的对象。
- 误报率较高:虽然YOLO的准确率相当高,但它的误报率也相对较高。这是因为YOLO在预测边界框时,可能会生成一些没有对象的边界框。
- 对对象的形状和大小敏感:YOLO在预测边界框时,主要依赖于预定义的一些边界框的形状和大小。这使得YOLO在处理一些形状和大小变化较大的对象时,可能无法准确地预测边界框。
- 对运动模糊和遮挡的处理不佳。
3.YOLO的应用场景
- 自动驾驶:用于识别道路上的车辆、行人、交通标志等。
- 安防监控:实时检测异常行为或可疑目标。
- 智能交通:监控交通流量、识别违规行为。
- 缺陷检测:在工业生产中快速识别产品缺陷。
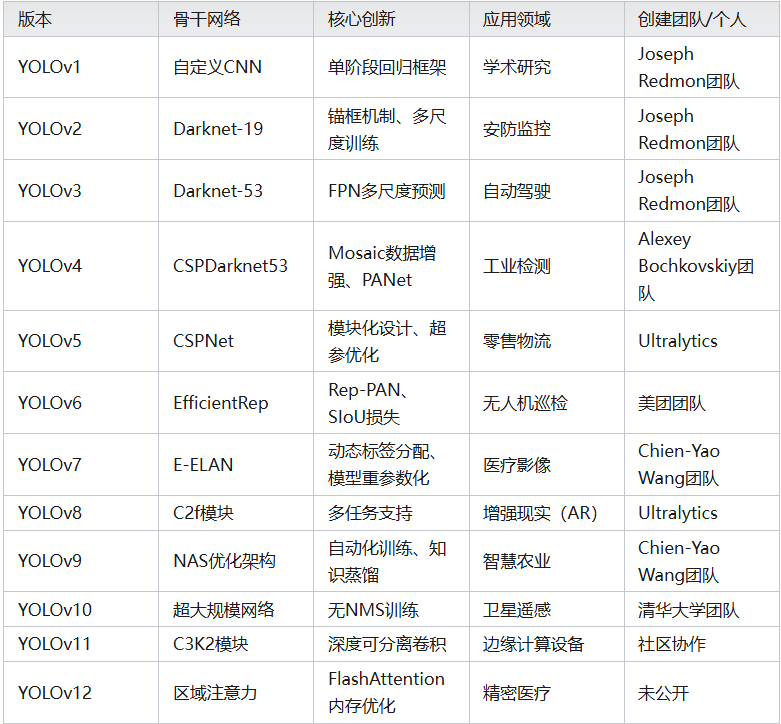
4.YOLO的发展历史
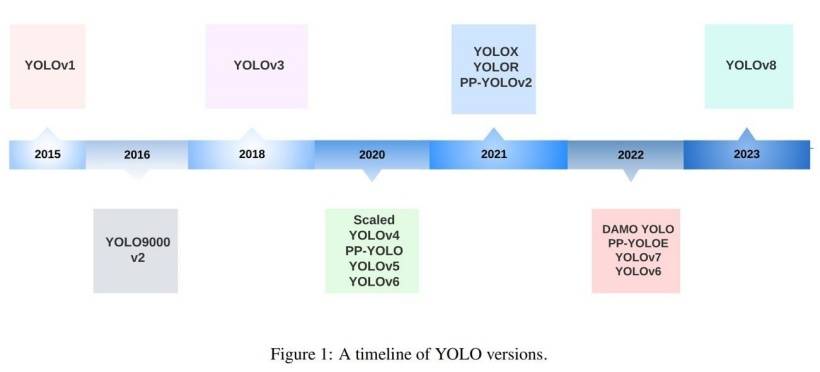
YOLO技术演进图谱与核心对比。