Yolov8+Gradio目标检测可视化基础案例
Yolov8+Gradio目标检测可视化基础案例
Yolov8+Gradio目标检测可视化基础案例。
1.代码实现
import cv2
import gradio as gr
from ultralytics import YOLO
model = YOLO('./model/yolov8n.pt')
classes = model.names
print(classes)
print(type(classes))
def object_detected(src, dest):
# 预测图片
predictions = model.predict(src)
# 解析预测结果
# 提取检测结果
object_counter = 0
result_msg = f'找到了{object_counter}个{dest}目标'
for result in predictions:
boxes = result.boxes.xyxy # 边界框坐标
scores = result.boxes.conf # 置信度分数
classes = result.boxes.cls # 类别索引
# 如果有类别名称,可以通过类别索引获取
class_names = [model.names[int(cls)] for cls in classes]
# 打印检测结果
for box, score, class_name in zip(boxes, scores, class_names):
if class_name == dest: # 找到了一个目标
object_counter += 1 # 目标数量加一
print(f"Class: {class_name}, Score: {score:.2f}, Box: {box}")
print(type(box))
coordinates = [box[i].item() for i in range(len(box))] # 将所有坐标值存储在
print(coordinates)
x1, y1, x2, y2 = coordinates
# Draw the bounding box on the BGR frame
cv2.rectangle(src, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
# Add a label above the box
cv2.putText(src, dest, (int(x1), int(y1) - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
result_msg = f'找到了{object_counter}个{dest}目标'
return src, result_msg
demo = gr.Interface(
fn=object_detected,
title='Yolov8目标检测案例',
inputs=[gr.Image(label='源图片'), gr.Dropdown(classes.values(), value='person', label='选择目标')],
outputs=[gr.Image(show_label=False), gr.Text(label='目标检测结果')],
examples=[['./images/sample001.png','person'], ['./images/sample002.jpg','bicycle'], ['./images/sample003.jpg','airplane'],['./images/sample004.jpg','car'],['./images/sample005.jpg','bus']]
)
if __name__ == "__main__":
demo.launch()
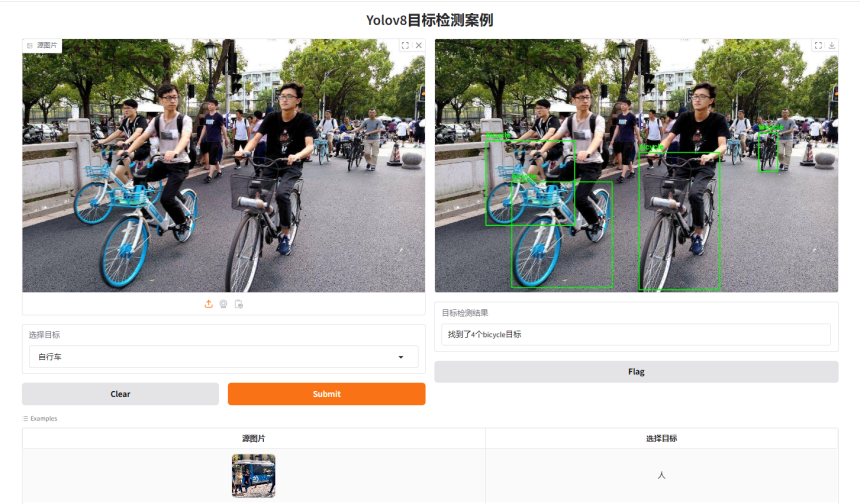
实现效果:

识别类别汉化版代码优化:
import cv2
import gradio as gr
from ultralytics import YOLO
model = YOLO('./model/predict/yolov8n.pt')
classes = model.names
print(classes)
print(type(classes))
chinese_classes={
0: '人',
1: '自行车',
2: '汽车',
3: '摩托车',
4: '飞机',
5: '公交车',
6: '火车',
7: '卡车',
8: '船',
9: '交通信号灯',
10: '消防栓',
11: '停车标志',
12: '停车计时器',
13: '长椅',
14: '鸟',
15: '猫',
16: '狗',
17: '马',
18: '羊',
19: '牛',
20: '大象',
21: '熊',
22: '斑马',
23: '长颈鹿',
24: '背包',
25: '雨伞',
26: '手提包',
27: '领带',
28: '行李箱',
29: '飞盘',
30: '滑雪板',
31: '滑板',
32: '运动球',
33: '风筝',
34: '棒球棒',
35: '棒球手套',
36: '滑板',
37: '冲浪板',
38: '网球拍',
39: '瓶子',
40: '酒杯',
41: '杯子',
42: '叉子',
43: '刀',
44: '勺子',
45: '碗',
46: '香蕉',
47: '苹果',
48: '三明治',
49: '橙子',
50: '西兰花',
51: '胡萝卜',
52: '热狗',
53: '披萨',
54: '甜甜圈',
55: '蛋糕',
56: '椅子',
57: '沙发',
58: '盆栽植物',
59: '床',
60: '餐桌',
61: '马桶',
62: '电视',
63: '笔记本电脑',
64: '鼠标',
65: '遥控器',
66: '键盘',
67: '手机',
68: '微波炉',
69: '烤箱',
70: '烤面包机',
71: '水槽',
72: '冰箱',
73: '书',
74: '钟表',
75: '花瓶',
76: '剪刀',
77: '泰迪熊',
78: '吹风机',
79: '牙刷'
}
def search_key_by_value(dest):
keys_with_value = [key for key, value in chinese_classes.items() if value == dest]
#print(keys_with_value)
return classes[keys_with_value[0]]
def object_detected(src, dest):
dest = search_key_by_value(dest)
# 预测图片
predictions = model.predict(src)
# 解析预测结果
# 提取检测结果
object_counter = 0
result_msg = f'找到了{object_counter}个{dest}目标'
for result in predictions:
boxes = result.boxes.xyxy # 边界框坐标
scores = result.boxes.conf # 置信度分数
classes = result.boxes.cls # 类别索引
# 如果有类别名称,可以通过类别索引获取
class_names = [model.names[int(cls)] for cls in classes]
# 打印检测结果
for box, score, class_name in zip(boxes, scores, class_names):
if class_name == dest: # 找到了一个目标
object_counter += 1 # 目标数量加一
print(f"Class: {class_name}, Score: {score:.2f}, Box: {box}")
print(type(box))
coordinates = [box[i].item() for i in range(len(box))] # 将所有坐标值存储在
print(coordinates)
x1, y1, x2, y2 = coordinates
# Draw the bounding box on the BGR frame
cv2.rectangle(src, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
# Add a label above the box
cv2.putText(src, dest, (int(x1), int(y1) - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
result_msg = f'找到了{object_counter}个{dest}目标'
return src, result_msg
demo = gr.Interface(
fn=object_detected,
title='Yolov8目标检测案例',
inputs=[gr.Image(label='源图片'), gr.Dropdown(chinese_classes.values(), value='人', label='选择目标')],
outputs=[gr.Image(show_label=False), gr.Text(label='目标检测结果')],
examples=[['./images/sample001.jpg','人'], ['./images/sample002.jpg','自行车'], ['./images/sample003.jpg','飞机'],['./images/sample004.jpg','汽车'],['./images/sample005.jpg','公交车']]
)
if __name__ == "__main__":
demo.launch()